|
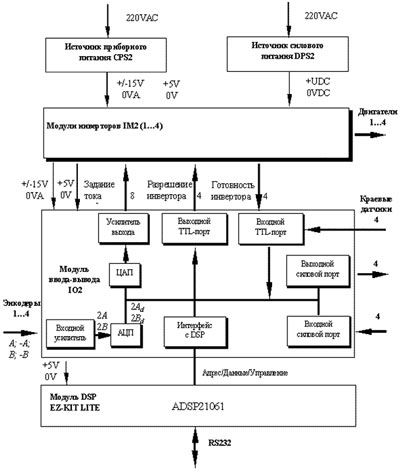
А. Балковой, Г. Сливинская, Г. Тяпкин Система управления линейным прецизионным электроприводом на базе сигнального процессора. Часть 2В [1] был описан системный подход к проектированию опытного образца блока управления линейным прецизионным электроприводом. В данном материале рассмотрены вопросы конструирования, защиты от помех и схемотехники отдельных узлов этого блока. Блок управления Servo2 предназначен для управления четырьмя осями прецизионного электропривода. С помощью блока можно управлять двухфазными синхронными и шаговыми двигателями, а также машинами постоянного тока. Возможно использование как линейных, так и поворотных двигателей. Для реализации замкнутого по пути режима к блоку подключаются аналоговые инкрементальные датчики положения. Управление блоком осуществляется по стандартному интерфейсу RS232 от PC-совместимого компьютера с минимальными системными требованиями. Характеристики блока управления Servo2 приведены в таблице. На рис. 1 представлена структурная схема блока. Он содержит быстродействующий DSP, ЦАП и АЦП, силовую электронику - инверторы тока, импульсный источник приборного питания и источник силового питания. Рисунок 1. Структурная схема блока Servo2
Проектирование блока потребовало решения вопросов, возникающих, как правило, при разработке любого сложного цифро-аналогового устройства:
Ниже рассмотрены решения этих вопросов применительно к основным узлам блока. Конструкция блока Servo2Блок выполнен в стандартном электротехническом конструктиве размером 400x300x250 мм. Его можно устанавливать на вертикальной или горизонтальной поверхности (рис. 2). Элементы блока (за исключением внешних разъ╦мов) закреплены на монтажной панели. Такая конструкция позволяет быстро монтировать блок, а также упрощает его обслуживание и ремонт. В основу конструкции положен принцип свободного монтажа по типу системных блоков ПЭВМ. Такая концепция имеет ряд преимуществ, по сравнению с кассетной конструкцией (типа Евромеханики):
Рисунок 2. Вид блока Servo2 с открытой крышкой
Блок питанияБлок питания состоит из источника приборного питания (CPS2) и источника силового питания (DPS2). Рынок предлагает сейчас большое количество приборных источников как зарубежных фирм, так и отечественных производителей. В блоке Servo2 использован импульсный источник фирмы ARTESYN NLP65, оптимальный по параметрам и цене. Для силового питания можно использовать дорогой мощный импульсный источник, дополненный цепью при╦ма рекуперируемой из приводов энергии, или построить деш╦вый трансформаторный выпрямитель с большим ╦мкостным фильтром на выходе, что увеличивает массу изделия. Из двух вариантов выбран второй с дополнением выпрямителя необходимыми блокировками, а также элементами защиты и индикации. Разводка питания в блоке определяет общий фон помех. В Servo2 реализован традиционный подход: трансформатор питания и силовые блоки располагаются как можно дальше от аналоговых модулей. Провода питания и заземления разведены по принципу звезды с объединением в одной точке на модуле силового питания. Все питающие провода выполнены витыми парами для снижения индуктивных помех. Модуль DSPВ качестве вычислительного ядра в блоке Servo2 используется отладочная плата EZ-KIT LITE с процессором ADSP21061. Состав платы: микросхема DSP, интерфейс RS232, микросхема памяти программ, стереокодек с усилителем и автономный стабилизатор питания - с избытком обеспечивает набор устройств, образующих контроллер электропривода. Удобно размещение микросхемы памяти программ в разъ╦ме, что позволяет доработать штатную программу монитора. Наличие на плате EZ-KIT LITE интерфейса JTAG для подключения аппаратного эмулятора и возможность дублирования штатных кнопок сброса и прерывания выносными кнопками облегчает применение платы при разработке блока управления электроприводом. На разъ╦мы по периметру платы EZ-KIT LITE выведены все сигналы DSP, что упрощает сопряжение с интерфейсной платой аналоговых и цифровых сигналов (модулем ввода/вывода IO2). Модуль ввода/вывода (IO2)Из рис. 1 видно, что на плате IO2 размещены все периферийные элементы блока Servo2. Функционально модуль можно разделить на четыре части:
Канал АЦП сигналов датчиков положенияВ [1] рассмотрены критерии выбора АЦП по быстродействию и разрядности. Конкретная микросхема AD7864, в соответствии с этими критериям, была применена с уч╦том:
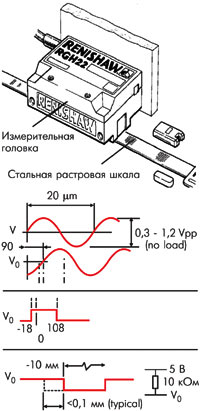
Особого внимания потребовала схемотехника входного дифференциального усилителя и связанная с ней процедура обработки сигналов датчиков положения. В системе Servo2 используется аналоговый инкрементальный энкодер фирмы RENISHAW. Внешний вид датчика и форма выходных сигналов показаны на рис. 3. Рисунок 3. Оптический аналоговый инкрементальный энкодер: а) внешний вид; б) форма выходных сигналов
Производитель гарантирует точностные характеристики датчика при использовании штатного кабеля с двойным экранированием и согласованием волнового сопротивления. Однако это схемотехническое решение не обеспечивает симметрию прямых и инверсных синусно-косинусных (каналы А; -A и В; -B) сигналов датчика. Сигналы энкодера имеют систематические ошибки (различие амплитуд сигналов по каналам, смещения нуля каналов, неквадратурность смежных каналов), вызванные перекосом измерительной головки относительно растровой шкалы и пульсацией воздушной опоры двигателя. Указанные погрешности устраняются программной обработкой в DSP, поэтому в качестве дифференциального усилителя можно использовать недорогую микросхему SSM2141 фирмы ANALOG DEVICES с фиксированным усилением для аудио-применения. Основное е╦ достоинство - интегрированные прецизионные сопротивления. Благодаря этому удалось компактно разместить на плате многоканальный дифференциальный каскад с хорошими характеристиками подавления синфазного сигнала и минимальным влиянием одного канала на другой. Коррекция сигналов датчика осуществляется в DSP специальной программой, анализирующей вид фигуры Лиссажу для каналов 2Ad и 2Вd (рис. 1) и синтезирующей 4 параметра коррекции:
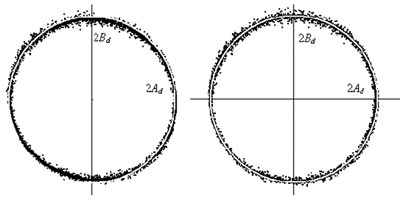
Сигналы каналов 2Ad и 2Вd после коррекции подвергаются арктангенсному преобразованию для получения информации о положении. На рис. 4 приведены фигуры Лиссажу для каналов 2Ad и 2Вd до и после коррекции. Сопутствующие помехи в младших разрядах в виде белого шума мало влияют на качество регулирования, так как фильтруются программой наблюдателя. Рисунок 4. Фигуры Лиссажу сигналов энкодера до программной коррекции (а) и после (б)
Канал ЦАП формирует задания токов в инверторы. В модуле IO2 установлены 2 микросхемы DAC8412 фирмы ANALOG DEVICES, которые выдают восемь сигналов с уровнем ±10 В. Микросхемы достаточно просты в подключении, но требуют внешних опорных напряжений. В описании микросхем рекомендуются дорогостоящие двухполярные источники опорного напряжения, хотя широко известна деш╦вая схема из однополярного источника и инвертора. В модуле IO2 использовано именно такое решение на популярной микросхеме REF-01 и инвертирующем усилителе на той же SSM2141. Цифровой интерфейс с DSP включает в себя стандартный набор из шинных формирователей данных и адреса, а также логики сигналов управления. В этой части схемы не использованы популярные сейчас ПЛИС. Это объясняется тем, что поступающие на плату IO2 сигналы ADSP21061 не буферированы, и дальнейшая их трансляция по модулю IO2 недопустима. Поэтому шинные формирователи и дискретная логика на модуле IO2 расположены непосредственно у разъ╦мов, что при использовании ПЛИС было бы невозможно. Силовые входы/выходы для технологических целей на IO2 реализованы в формате стандартных модулей с гальванической развязкой. Такие модули УСО выпускаются фирмами GRAYHILL, MATSUSHITA, OPTO22 и ПРОТОН. Все они имеют стандартную конструкцию и электрические параметры. Следует отметить, что качество разводки земляных и питающих проводников на модуле IO2 имеет первостепенное значение. Разделение цифровой и аналоговой земель, наличие фильтров по питанию для высоких и низких частот с использованием танталовых конденсаторов обязательно. Важна также топология сигнальных проводников, которые должны иметь минимальные ╦мкость и индуктивность. Все эти требования удовлетворяются с помощью современной элементной базы в миниатюрных корпусах. Модуль IO2 реализован с применением SMD-компонентов на двухслойной печатной плате. Модуль инвертора тока (IM2)Функциональная схема и расч╦т электрических параметров инвертора тока IM2 описаны в [1]. Здесь рассмотрена специфика проектирования этого модуля и его конструкция. Силовая часть модуля состоит из двух полных мостовых инверторов на полевых транзисторах IRF640, управляемых драйверами IR2132. Конструкция инвертора одноплатная. Все SMD-компоненты регулятора, ШИМ и драйверы ключей расположены с одной стороны платы, а силовые ключи на радиаторе и компоненты в стандартных корпусах - с другой. Помимо уч╦та рекомендаций по применению фирмы IR, при проектировании инвертора реализовано следующее:
Схема регулятора и ШИМ расположена на одной плате с силовой и не имеет с ней гальванической развязки. Такая конструкция требует тщательного проектирования топологии модуля, так как помехи из силовой части по общим цепям земли и питания могут сбивать работу ШИМ. В ШИМ тщательно нужно отнестись к выбору элементов генератора пилы. Линейность генератора пилы определяет качество регулирования тока. В регуляторе тока необходимо использовать быстродействующий операционный усилитель со скоростью нарастания сигнала не менее 40 В/мкс. В инверторе IM2 генератор настроен на частоту 40 кГц и построен на микросхеме TL082, а в регуляторе тока используется операционный усилитель LM318. Заложенные в конструкцию прототипа блока управления схемотехнические и конструктивные решения показали высокую над╦жность и помехозащищ╦нность. При тиражировании малой серии блока Servo2 запланировано конструирование и изготовление собственной платы DSP с незначительными доработками прототипа EZ-KIT LITE. Блоки предназначены для комплектации прецизионных лазерных технологических установок с тр╦хосевым электроприводом на базе линейных шаговых двигателей. Таблица. Характеристики блока управления Servo2
Литература
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
 |
 |
PDFs | Новости | Литература | Схемы | Форум | Блоги | Реклама |
Чипинфо
 Система управления линейным прецизионным электроприводом на базе сигнального процессора. Часть 2.
Система управления линейным прецизионным электроприводом на базе сигнального процессора. Часть 2.